- DESCONTINUADO


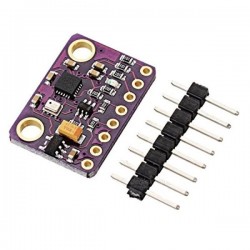
GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
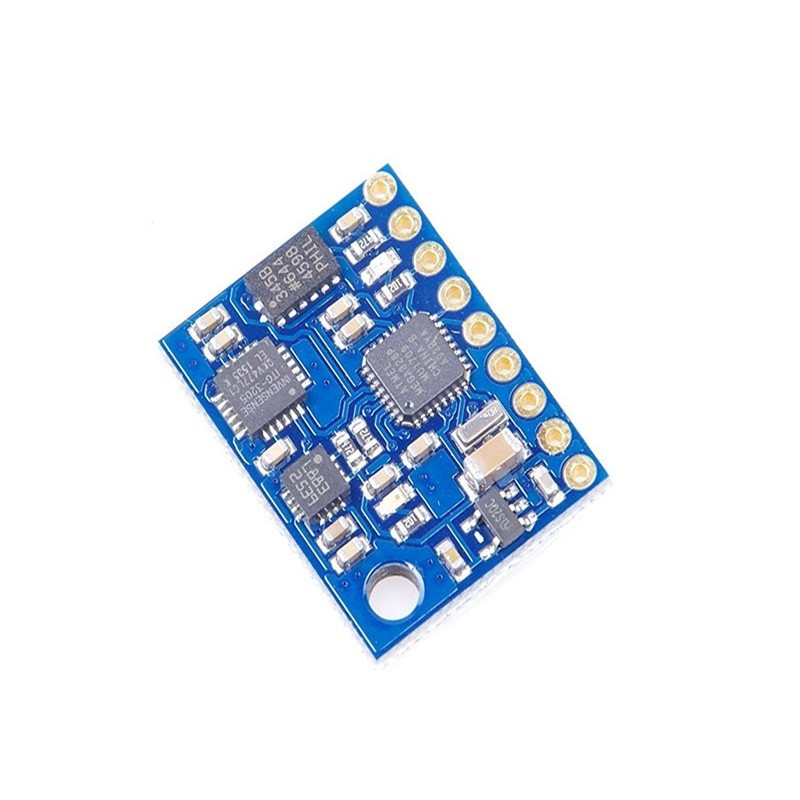
Description
GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface. The power and 2-wire interface pins are all broken out to a 0.1" pitch header. Uses famous HMC5883L, ITG3205 and ADXL345 magnetometer chips. Supports 3.0V to 5.0V IO levels on I2C SCL and SDA pins.
Specification:

Produtos Associados



GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface