- DISCONTINUED


GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface
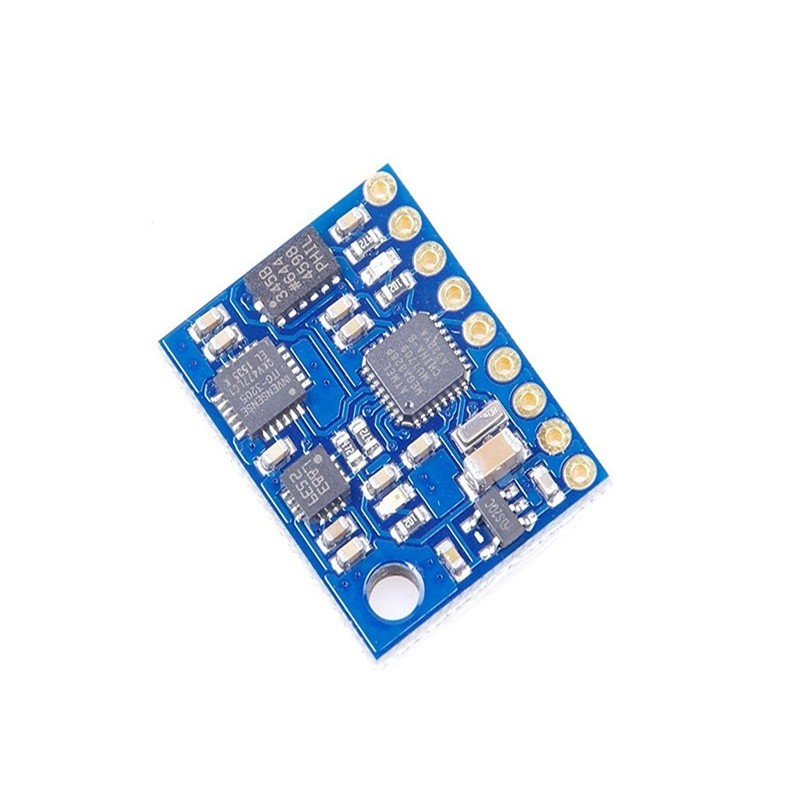
Description
GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface. The power and 2-wire interface pins are all broken out to a 0.1" pitch header. Uses famous HMC5883L, ITG3205 and ADXL345 magnetometer chips. Supports 3.0V to 5.0V IO levels on I2C SCL and SDA pins.
Specification:

Related products



GY-85 IMU 9DOF Sensor that has nine (9) axis which are three (3)-axis gyroscope, triaxial accelerometer and three (3)-axis magnetic field. Communication with the HMC5883L, ITG3205 and ADXL345 is simple and all done through an I2C interface