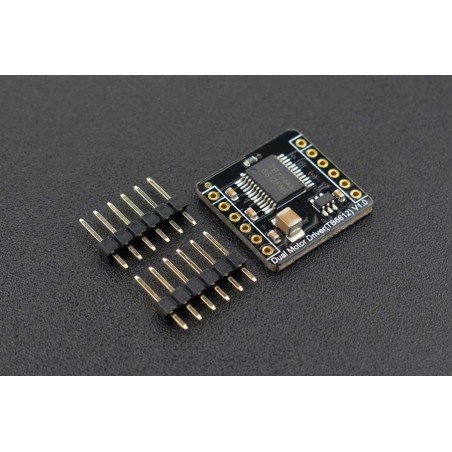


Este driver de motor DC dual-way DFRobot é projetado com base no driver de motor TB6612FNG. Precisa apenas de quatro pinos para acionar dois motores, economizando assim dois preciosos recursos do GPIO, especialmente na placa Arduino UNO.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
TB6612FNG is a dual-channel full-bridge drive chip. The maximum continuous drive current of single channel can reach 1.2A, peak value 2A/3.2A (continuous pulse / single pulse) , which can drive some micro DC motors. The control logic is similar to L298n, and the code can be directly compatible with the DFROBOT L298N motor driver. Standard XH2.54 pin can be inserted directly into the breadboard. It is a good choice for DIY project or product developments.

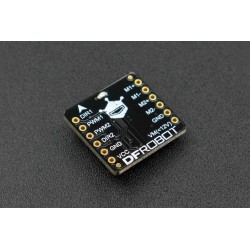
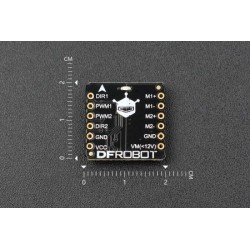
| Label | Number | Description |
| 1 | DIR1 | M1 Direction Control |
| 2 | PWM1 | M1 Speed control(PWM) |
| 3 | PWM2 | M2 Speed control(PWM) |
| 4 | DIR2 | M2 Direction Control |
| 5 | GND | Negative power supply |
| 6 | VCC | Power 3.3V-5V or IO port output high |
| 7 | M1+ | A Output 1 |
| 8 | M1- | A Output 2 |
| 9 | M2+ | B Output 1 |
| 10 | M2- | B Output 2 |
| 11 | GND | Negative power supply |
| 12 | VM(<12V) | Motor drive power 3.3V-12V |

int PWM1 = 5; int DIR1 = 4; int PWM2 = 6; int DIR2 = 7; void setup() { pinMode(DIR1, OUTPUT); pinMode(DIR2, OUTPUT); } void loop() { int value; for(value = 0 ; value <= 255; value+=5) { digitalWrite(DIR1,HIGH); digitalWrite(DIR2, HIGH); analogWrite(PWM1, value); //PWM Speed Control analogWrite(PWM2, value); //PWM Speed Control delay(30); } }
Two motor speeds change from 0 to maximum, cycle.

Produtos Associados



Este driver de motor DC dual-way DFRobot é projetado com base no driver de motor TB6612FNG. Precisa apenas de quatro pinos para acionar dois motores, economizando assim dois preciosos recursos do GPIO, especialmente na placa Arduino UNO.