







Com esta base de lagartas, poderá desenvolver os seus projectos móveis com Arduino, Raspberry ou Micro:bit. Tudo dependerá da sua imaginação!
Fornecido em peças para montagem, ver imagens em baixo com o processo de assemblagem.
DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
The track is made of engineering plastic that basically assured the good elasticity, excellent damping effect and large road grip of the product. What’ s more, it comes with two quality motors to provide high power and speed, which enables your DIY robot car to widely suit all kinds of road surfaces.
To explore more possibilities, you can use this tracked chassis with Arduino microcontrollers or add other electronic components on the base such as, IR sensor, ultrasonic sensor, camera, LED, display, WIFI module, etc. For Arduino fans and smart robot car lovers, this is a good choice for you!
Note: the tracked chassis is unassembled, you need to get it done by yourself.
“Black Gladiator”Tracked Chassis Installation tutorial
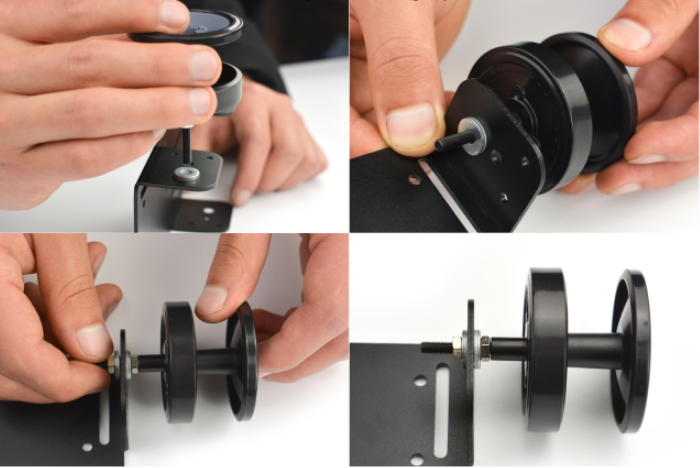
Step 1: Install the load-bearing wheel (first install the M4*50 long screw into the load-bearing wheel), and lock the other side with the M4 screw.

Step2: place the gasket on the bracket and insert the load-bearing wheel into the hole of the bracket; the other end is also fitted with a gasket, which is also locked with the M4 nut. Be careful not to screw the load-bearing wheel too tightly.
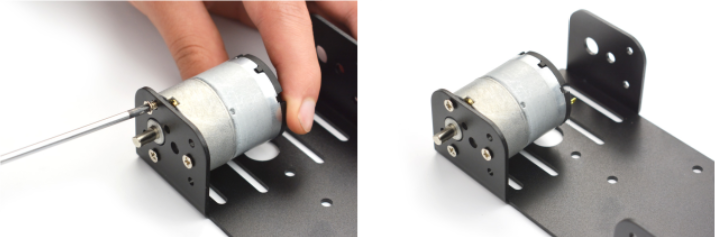
Step 3: Insert the motor into the bracket and tighten it with 3 M3*6 flat head screws.
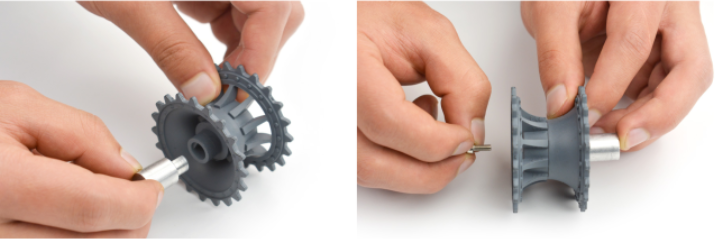
Step 4:Install the drive wheel: firstly insert the coupling into the drive wheel, and at the other end, use the allen key to fit the M3*8 hex socket screw into the drive wheel and lock it with the coupling.
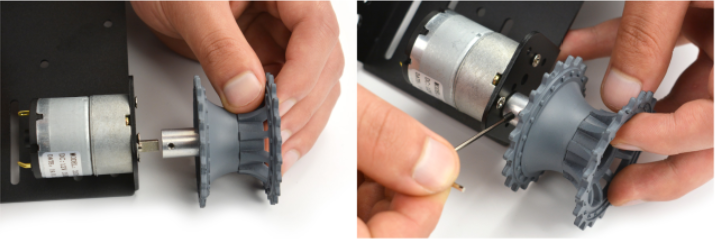
Step 5:Install the drive wheel on the motor and tighten with black screw; please note: the hole on the coupling must be aligned with the flat end of the motor shaft.
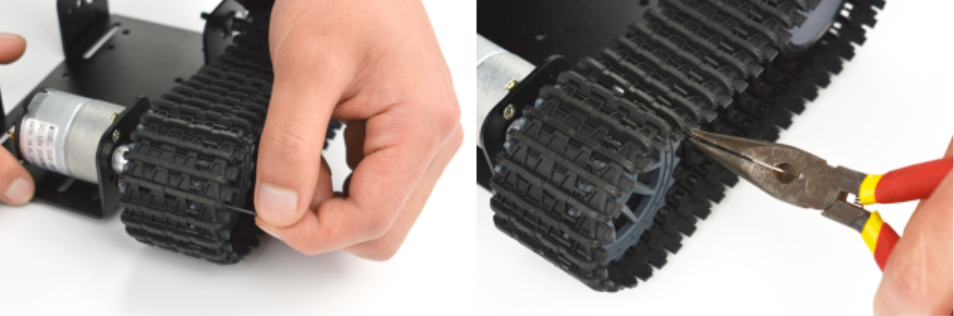
Step 6: Remove the track first, remove the excess part of the track, and measure the required track length.
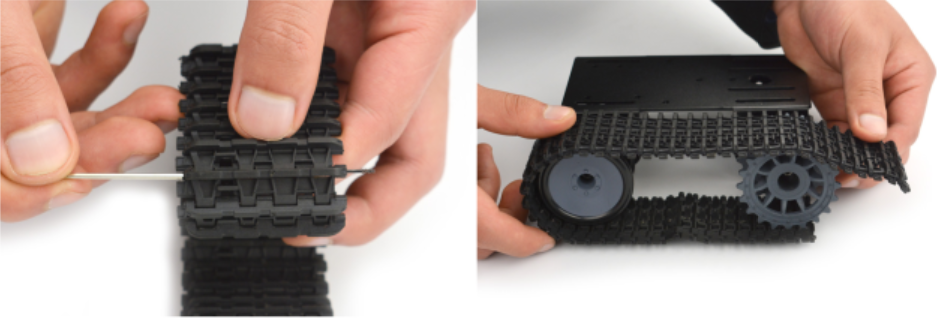
Embed the track pin into the track with a pair of pincers
How To Make DIY Arduino Traffic Sign Recognition Robot
How To Make DIY Arduino Bluetooth Controlled Robot At Home
Black Gladiator-Tracked Chassis x1

Produtos Associados



Com esta base de lagartas, poderá desenvolver os seus projectos móveis com Arduino, Raspberry ou Micro:bit. Tudo dependerá da sua imaginação!
Fornecido em peças para montagem, ver imagens em baixo com o processo de assemblagem.
