- Em promoção!
- -2,60 €
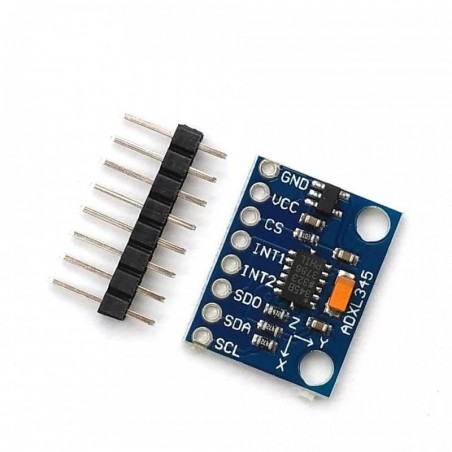


Acelerómetro de 3 eixos com comunicação I2C/SPI de alta resolução (13 bits) que mede até ± 16 g.
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
O ADXL345 é um acelerómetro de 3 eixos, de tamanho reduzido, baixo consumo, e de alta resolução (13 bits) que mede até ± 16 g. Os dados de 16-bit disponíveis para leitura estão formatados em complemento para dois e acessíveis através de interface digital I2C ou SPI (3 - ou 4 fios).
O ADXL345 é adequado para medição estática da aceleração da gravidade em aplicações que seja necessário medir a inclinação (tilt), bem como medição da aceleração dinâmica resultante do movimento ou choque. A sua elevada resolução (4 mg / LSB) permite a medição de alterações de inclinação inferiores a 1,0 °.
Funções especiais de sensorização são fornecidas:
Deteção de atividade e inatividade - deteta a presença ou ausência de movimento e se a aceleração em qualquer eixo ultrapassa um nível definido pelo utilizador
Deteção de toque - deteta toques individuais e duplos.
Deteção de queda livre - deteta se o dispositivo está a cair.
Estas funções podem ser mapeadas para um de dois pinos de saída de interrupção. Um buffer FIFO (First In , First Out) de 32 posições, com patente pendente, pode ser usado para armazenar os dados e minimizar a intervenção do processador MASTER. Modos de baixo consumo permitem a gestão inteligente de energia com base no movimento em que se efecua a medição usando sensor de limite e medição da aceleração activa, tudo isto com dissipação de energia extremamente baixa.
Características:
• Tensão de alimentação: 3-5VDC;
• Faixa de medição: ± 2g ± 16g;
• Deteção de toque / duplo toque;
• Deteção de queda livre;
• Interface I2C e SPI.
Inclui:
• 1x Módulo Acelerómetro ADXL345
Upload the sample sketch bellow to UNO or your board to check the 3-axis acceleration data and the module's tilt information.
For Arduino
#include <Wire.h>
#define DEVICE (0x53) //ADXL345 device address
#define TO_READ (6) //num of bytes we are going to read each time (two bytes for each axis)
byte buff[TO_READ] ; //6 bytes buffer for saving data read from the device
char str[512]; //string buffer to transform data before sending it to the serial port
int regAddress = 0x32; //first axis-acceleration-data register on the ADXL345
int x, y, z; //three axis acceleration data
double roll = 0.00, pitch = 0.00; //Roll & Pitch are the angles which rotate by the axis X and y
//in the sequence of R(x-y-z),more info visit
// https://www.dfrobot.com/wiki/index.php?title=How_to_Use_a_Three-Axis_Accelerometer_for_Tilt_Sensing#Introduction
void setup() {
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
//Turning on the ADXL345
writeTo(DEVICE, 0x2D, 0);
writeTo(DEVICE, 0x2D, 16);
writeTo(DEVICE, 0x2D, 8);
}
void loop() {
readFrom(DEVICE, regAddress, TO_READ, buff); //read the acceleration data from the ADXL345
//each axis reading comes in 10 bit resolution, ie 2 bytes. Least Significat Byte first!!
//thus we are converting both bytes in to one int
x = (((int)buff[1]) << 8) | buff[0];
y = (((int)buff[3])<< 8) | buff[2];
z = (((int)buff[5]) << 8) | buff[4];
//we send the x y z values as a string to the serial port
Serial.print("The acceleration info of x, y, z are:");
sprintf(str, "%d %d %d", x, y, z);
Serial.print(str);
Serial.write(10);
//Roll & Pitch calculate
RP_calculate();
Serial.print("Roll:"); Serial.println( roll );
Serial.print("Pitch:"); Serial.println( pitch );
Serial.println("");
//It appears that delay is needed in order not to clog the port
delay(50);
}
//---------------- Functions
//Writes val to address register on device
void writeTo(int device, byte address, byte val) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); // send register address
Wire.write(val); // send value to write
Wire.endTransmission(); //end transmission
}
//reads num bytes starting from address register on device in to buff array
void readFrom(int device, byte address, int num, byte buff[]) {
Wire.beginTransmission(device); //start transmission to device
Wire.write(address); //sends address to read from
Wire.endTransmission(); //end transmission
Wire.beginTransmission(device); //start transmission to device
Wire.requestFrom(device, num); // request 6 bytes from device
int i = 0;
while(Wire.available()) //device may send less than requested (abnormal)
{
buff[i] = Wire.read(); // receive a byte
i++;
}
Wire.endTransmission(); //end transmission
}
//calculate the Roll&Pitch
void RP_calculate(){
double x_Buff = float(x);
double y_Buff = float(y);
double z_Buff = float(z);
roll = atan2(y_Buff , z_Buff) * 57.3;
pitch = atan2((- x_Buff) , sqrt(y_Buff * y_Buff + z_Buff * z_Buff)) * 57.3;
}
Produtos Associados
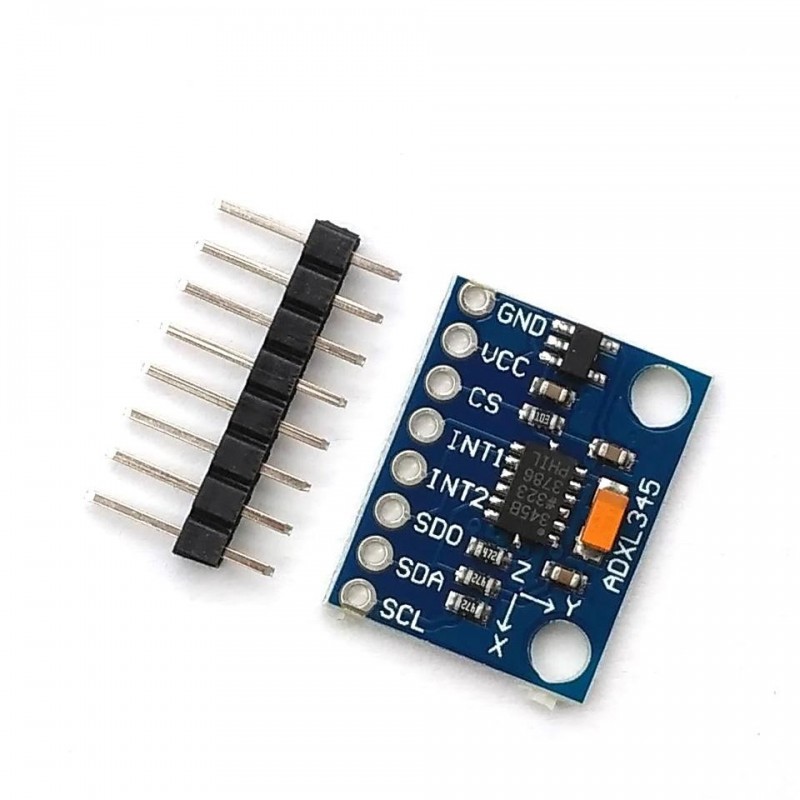
Acelerómetro de 3 eixos com comunicação I2C/SPI de alta resolução (13 bits) que mede até ± 16 g.
