- DESCONTINUADO
- Em promoção!
- -1,00 €






DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
Motor Control Shield is capable of driving 4 DC motors or 2 stepping motors at one time.
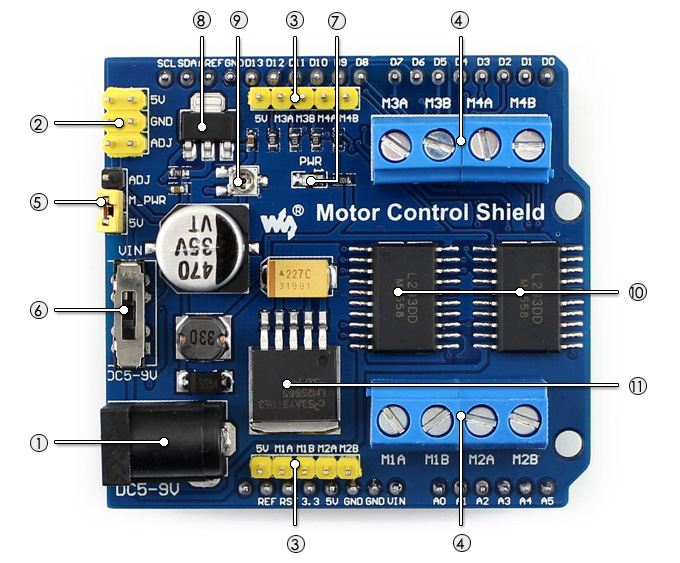
Note : when in operation, it's normal that the onboard motor drivers and regulators generate lots of heat.
Development resources: demo codes, schematic, datasheets, etc.
www.waveshare.com/Motor_Control_Shield
int motor1_dir1 = 12;int motor1_dir2 = 13;int motor1_pwm = 11;int motor2_dir1 = 8;int motor2_dir2 = 7;int motor2_pwm = 10;int motor3_dir1 = 5;int motor3_dir2 = 4;int motor3_pwm = 9;int motor4_dir1 = 3;int motor4_dir2 = 2;int motor4_pwm = 6;void setup(){pinMode(motor1_dir1,OUTPUT);pinMode(motor1_dir2,OUTPUT);pinMode(motor1_pwm,OUTPUT);pinMode(motor2_dir1,OUTPUT);pinMode(motor2_dir2,OUTPUT);pinMode(motor2_pwm,OUTPUT);pinMode(motor3_dir1,OUTPUT);pinMode(motor3_dir2,OUTPUT);pinMode(motor3_pwm,OUTPUT);pinMode(motor4_dir1,OUTPUT);pinMode(motor4_dir2,OUTPUT);pinMode(motor4_pwm,OUTPUT);digitalWrite(motor1_dir1,0);digitalWrite(motor1_dir2,1);digitalWrite(motor1_pwm,1);digitalWrite(motor2_dir1,0);digitalWrite(motor2_dir2,1);digitalWrite(motor2_pwm,1);digitalWrite(motor3_dir1,0);digitalWrite(motor3_dir2,1);digitalWrite(motor3_pwm,1);digitalWrite(motor4_dir1,0);digitalWrite(motor4_dir2,1);digitalWrite(motor4_pwm,1);}void loop(){analogWrite(motor1_pwm, 128);analogWrite(motor2_pwm, 128);analogWrite(motor3_pwm, 128);analogWrite(motor4_pwm, 128);delay(500);}

Produtos Associados


