DESCRIÇÃO EM PORTUGUÊS BREVEMENTE DISPONÍVEL
Se tiver alguma dúvida neste produto não hesite em contactar-nos.
*Atenção: as imagens são meramente ilustrativas.
These white plastic wheels have rubber tires measuring 42 mm (1.65″) in diameter and press-fit onto the 3mm D output shafts on many of our motors, including our micro metal gearmotors and our plastic gearmotors with 3mm D-shafts. Teeth on the hub optionally allow a reflectance sensor to be used for encoder feedback. These wheels are sold in pairs.
 |
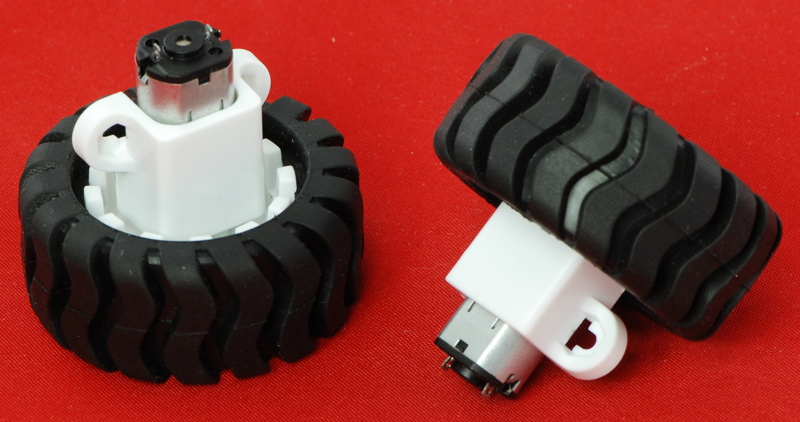
These rugged wheels are designed to press-fit securely onto the 3mm D output shafts of our micro and 15.5D metal gearmotors. These gearmotors should be mounted onto the side of the hub with the protruding teeth, as shown on the right. The output shaft will slide into the socket easily at first but will achieve a snug fit when pressed through to the other edge of the hub.
The output shafts on our selection of Solarbotics metal gear motors will also fit these wheels, but because they are shorter they will have to be mounted onto the other side of the wheel where the fit is tighter (which means the Solarbotics metal gearmotors will not work with the quadrature encoder associated with this wheel). These wheels will also work in this orientation on the Pololu plastic gearmotors with 3mm D-shaft outputs.
Our extended micro metal gearmotor bracket is specifically designed to work with this wheel. Please note that the non-extended version of our mounting bracket (product #989) will not work well with this wheel.
 |
|
Micro metal gearmotor with Pololu wheel 42×19mm and extended bracket. |
|---|
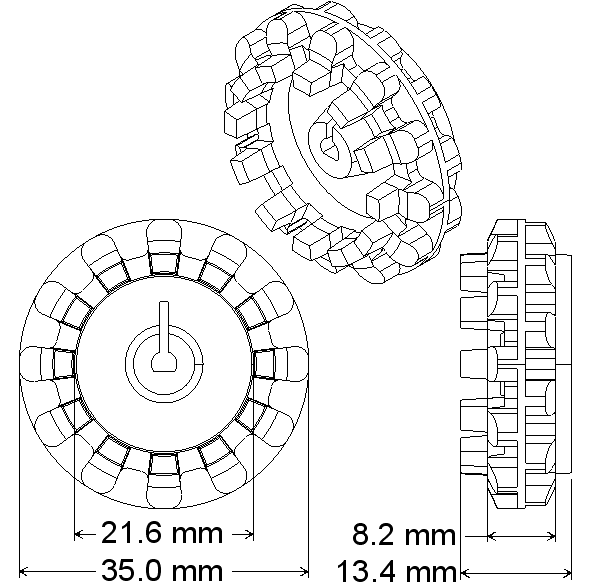 |
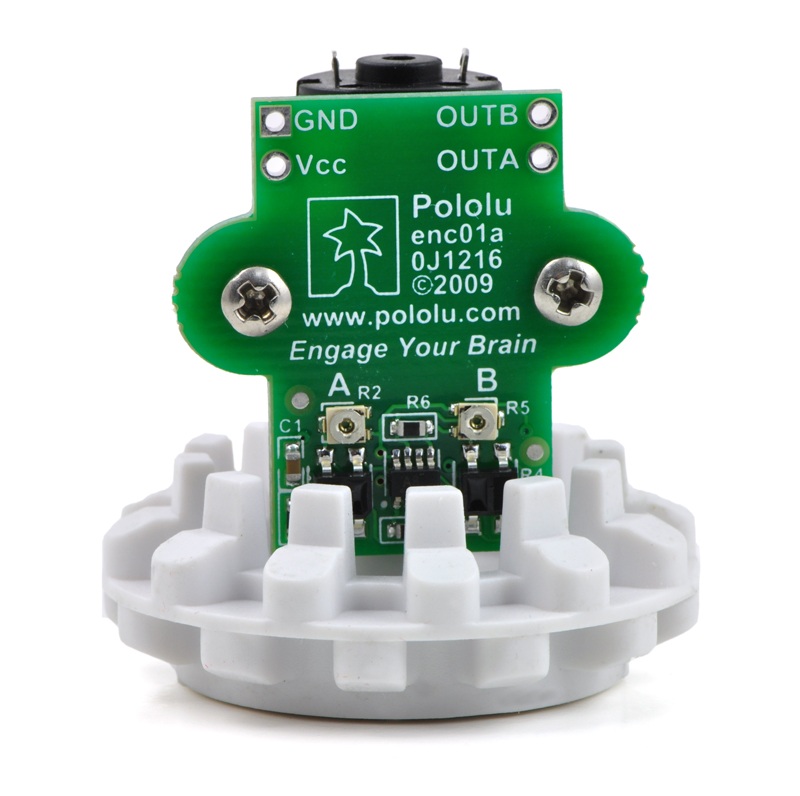
The hub has twelve teeth, each 3 mm wide and separated from its neighbors by 3 mm gaps. We offer a quadrature encoder that uses these teeth to provide up to 48 counts per revolution (a linear resolution of just under 3 mm or 1/8″). The encoder is designed to work with our extended micro metal gearmotor bracket and our micro metal gearmotors as shown in the pictures below. The compact layout of the board fits all of the components within the envelope of the hub and tire, allowing the board to be mounted between the motor and a chassis. The encoder can be purchased as an individual unit or as a part of an encoder set that includes two encoders, a pair of extended brackets, and a pair of 42×19mm wheels.
|
|
|
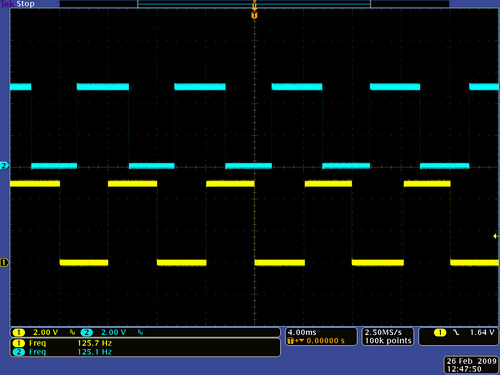
The following oscilloscope capture shows the two encoder output channels while the 42×19mm wheel is spinning at close to 630 RPM. The two channels are approximately 90° out of phase, allowing you to determine both rotational speed and direction.
 |
|
Oscilloscope capture of encoder outputs with the wheel spinning at 630 RPM. |
|---|

Produtos Associados