





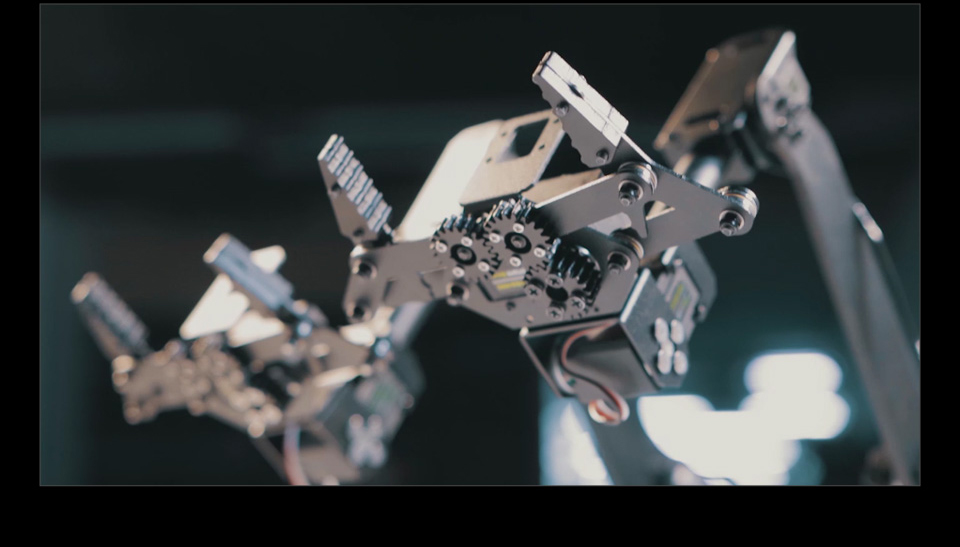
RoArm-M1 is a mechanical arm based on the ESP32 series structure, including the clamping freedom of the gripper. This product has a total of 5 degrees of freedom, all of which are driven by a 30kg.cm high-torque ST3215 serial bus servo. Each servo can feed back the current joint voltage, position, current, temperature, load, and other information. And the big arm adopts a 1:3 reduction group with timing pulleys, which greatly improves the effective torque of the mechanical arm on the one hand, and can be used to avoid damage to structural parts caused by excessive loads on the other hand.
If you want to know more about this product, please check the Wiki Page.
If you have any questions on this product please feel free to contact us.
*Disclaimer: The images are merely illustrative.

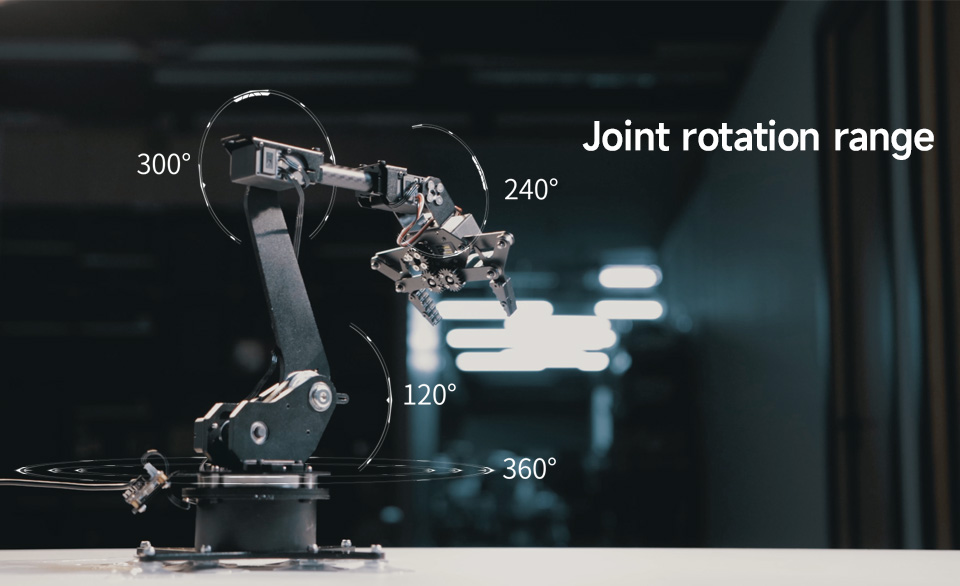
RoArm-M1 is a serial robotic arm with 5-DOF in total, including the clamping freedom of the gripper
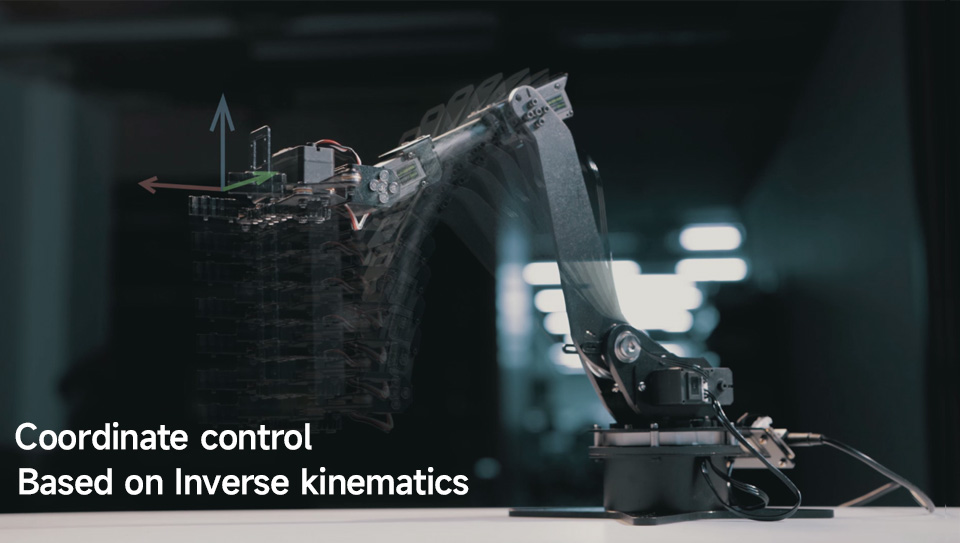
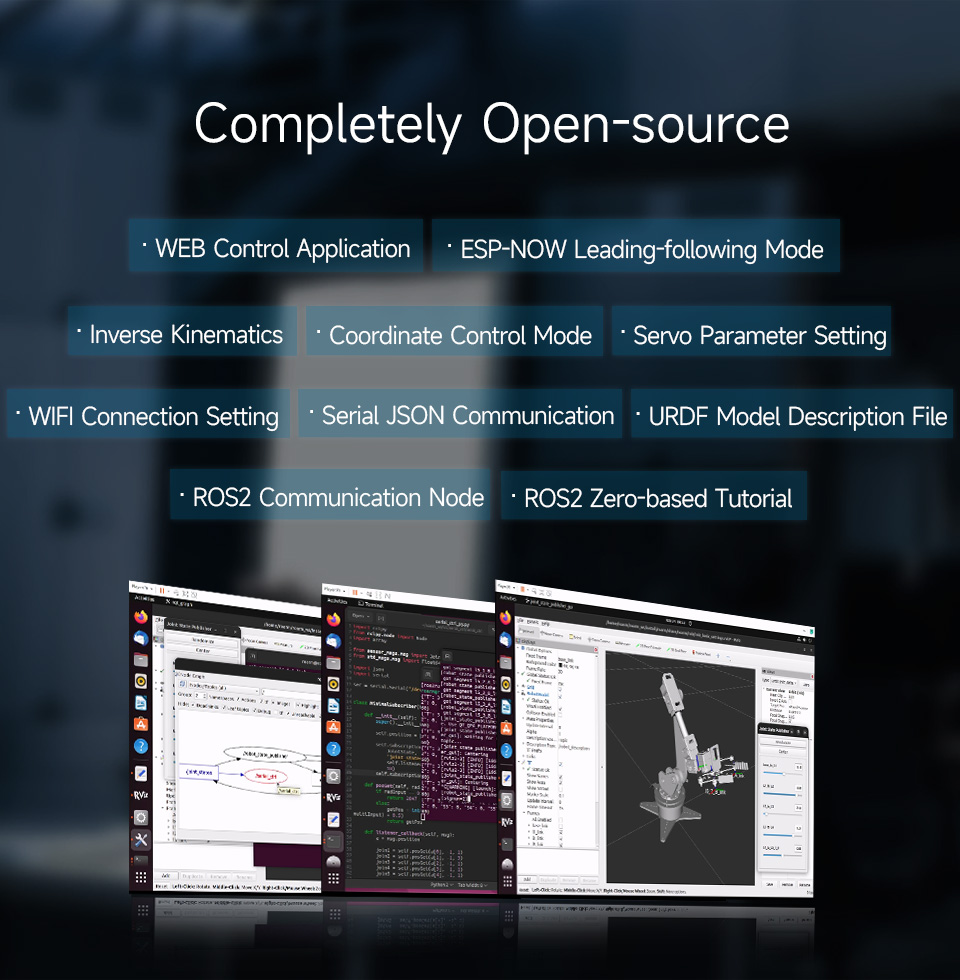
Two control methods in demo: Angle control and Coordinate control
Supports Leading-following mode based on ESP-NOW
Supports motion recording and replaying control mode
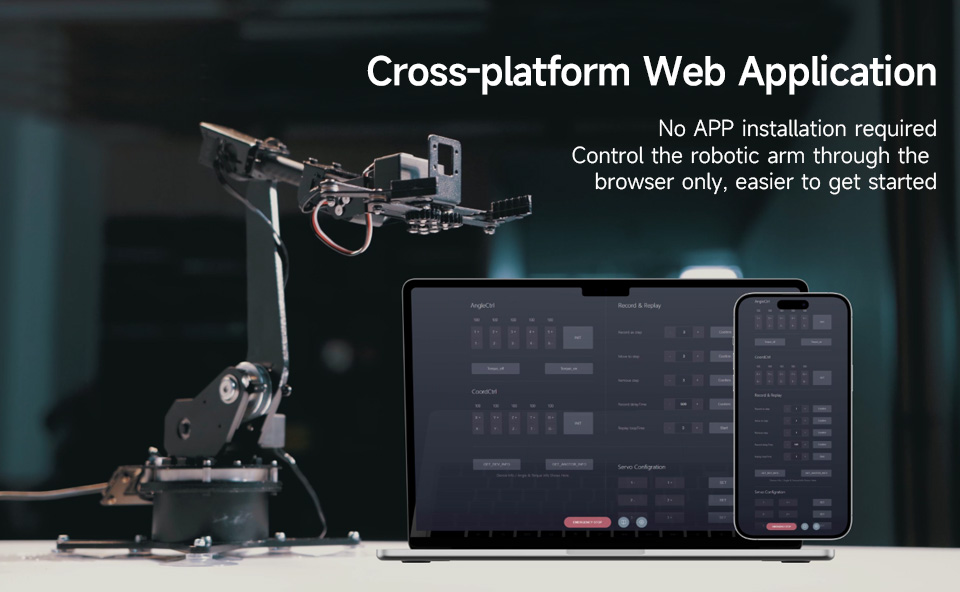
Based on ESP32, supports WIFI and UART communication, provides multiple motion model demos and cross-platform Web application
Supports multiple host computers, provides ROS 2 demo and other rich learning resources


Stainless steel gripper - Carbon fiber arm - Aluminum body



Support multiple wireless communication methods: 2.4G WiFi, Bluetooth 4.2, ESP-NOW
Servo torque lock can be turned on/off, and the servo can be rotated by external force after the torque lock is turned off


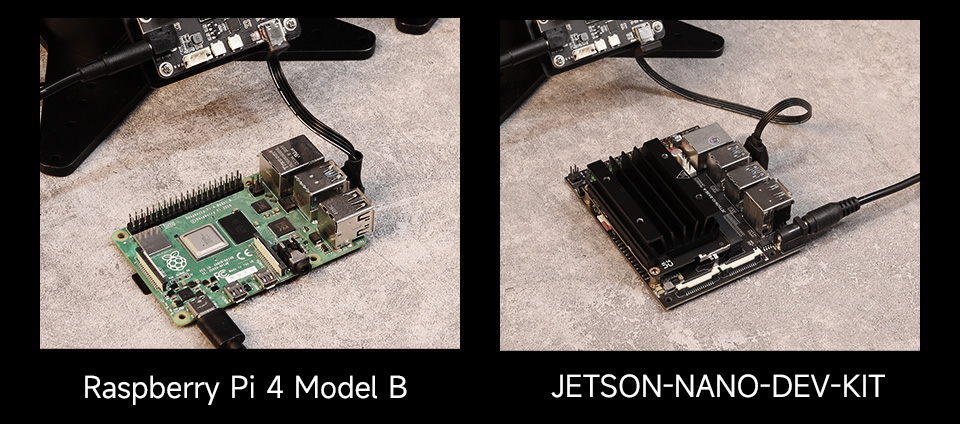
The Robotic Arm Can Be Connected To Raspberry Pi, Jetson Nano, PC And Other Host Computers Via USB cable

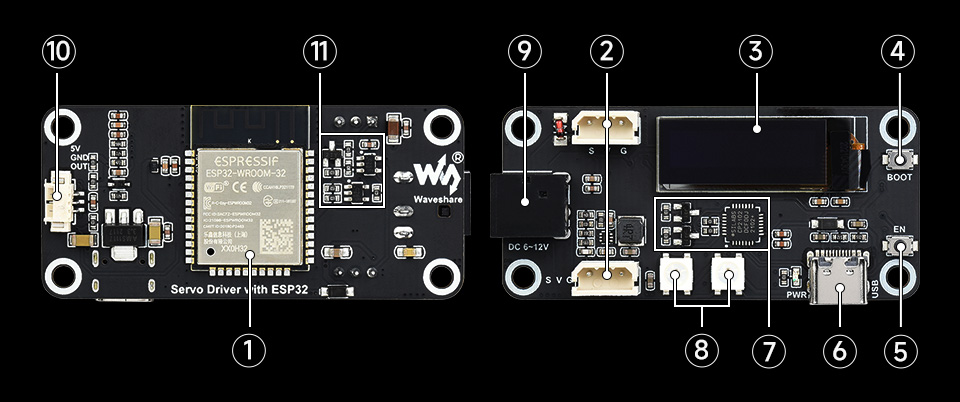
ESP32-WROOM-32 main controller
Servo control header
OLED screen
Download button
Reset button
Type-C port
Download/UART communication
USB to UART circuit
RGB LED
12V DC power jack
RGB LED extension port
Serial bus servo control circuit




WIKI: www.waveshare.com/wiki/RoArm-M1
Weight: 1.9 kg
RoArm-M1 and package box x1
12V 5A power supply x1
 2
2

Related products






RoArm-M1 is a mechanical arm based on the ESP32 series structure, including the clamping freedom of the gripper. This product has a total of 5 degrees of freedom, all of which are driven by a 30kg.cm high-torque ST3215 serial bus servo. Each servo can feed back the current joint voltage, position, current, temperature, load, and other information. And the big arm adopts a 1:3 reduction group with timing pulleys, which greatly improves the effective torque of the mechanical arm on the one hand, and can be used to avoid damage to structural parts caused by excessive loads on the other hand.
If you want to know more about this product, please check the Wiki Page.
