




This is a motor revolution: a new DC brushless motor with built-in motor driver. It can be connected to Arduino directly without external motor driver
If you have any questions on this product please feel free to contact us.
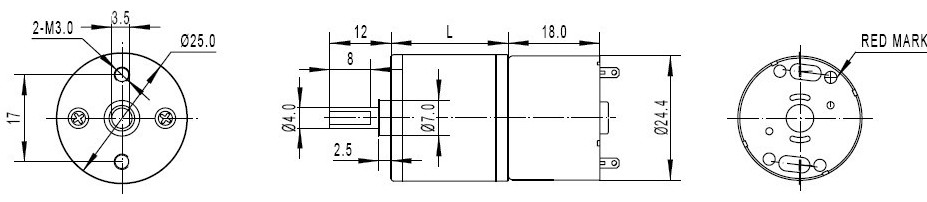
*Disclaimer: The images are merely illustrative.
This is a new brushless DC motor with the added bonus of a built-in motor driver - this means it doesn't need any external motor drivers and you can connect it to an Arduino board directly!
The brushless motor comes with direction control, PWM rotational speed control and frequency feedback output. It is suitable for miniature-sized mobile robotic platforms. With the motor speed feedback signal, it is useful in cyclic control systems.

| Label | Name | Description |
|---|---|---|
| 1 | PWM | PWM Control, 0-5V (20~30KHz) |
| 2 | Power - | POWER- (GND) |
| 3 | Direction | Direction Pin:+5V or dangling, motor moves forward; GND or cathode, motor moves backward. |
| 4 | FG | FG signal pin(need a pull-up resister-5k) |
| 5 | Power + | POWER+ (12V) |
NOTE: Sometime, the manufacturer provides a different color cable, but the cable order is same.
Here is a example how to use this motor, Just follow the guide, and you will get it work.
First, prepare the following hardware and software.
After the hardware, the module is connected with the UNO in the following diagram.

int i = 0;
unsigned long time = 0;
bool flag = HIGH;
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
pinMode(10, OUTPUT); //direction control PIN 10 with direction wire
pinMode(11, OUTPUT); //PWM PIN 11 with PWM wire
}
void loop() {
// put your main code here, to run repeatedly:
if (millis() - time > 5000) {
flag = !flag;
digitalWrite(10, flag);
time = millis();
}
if (Serial.available()) {
analogWrite(11, Serial.parseInt()); //input speed (must be int)
delay(200);
}
for(int j = 0;j<8;j++) {
i += pulseIn(9, HIGH, 500000); //SIGNAL OUTPUT PIN 9 with white line,cycle = 2*i,1s = 1000000us,Signal cycle pulse number:27*2
}
i = i >> 3;
Serial.print(111111 / i); //speed r/min (60*1000000/(45*6*2*i))
Serial.println(" r/min");
i = 0;
}


Related products


This is a motor revolution: a new DC brushless motor with built-in motor driver. It can be connected to Arduino directly without external motor driver
